Click on images for more information.

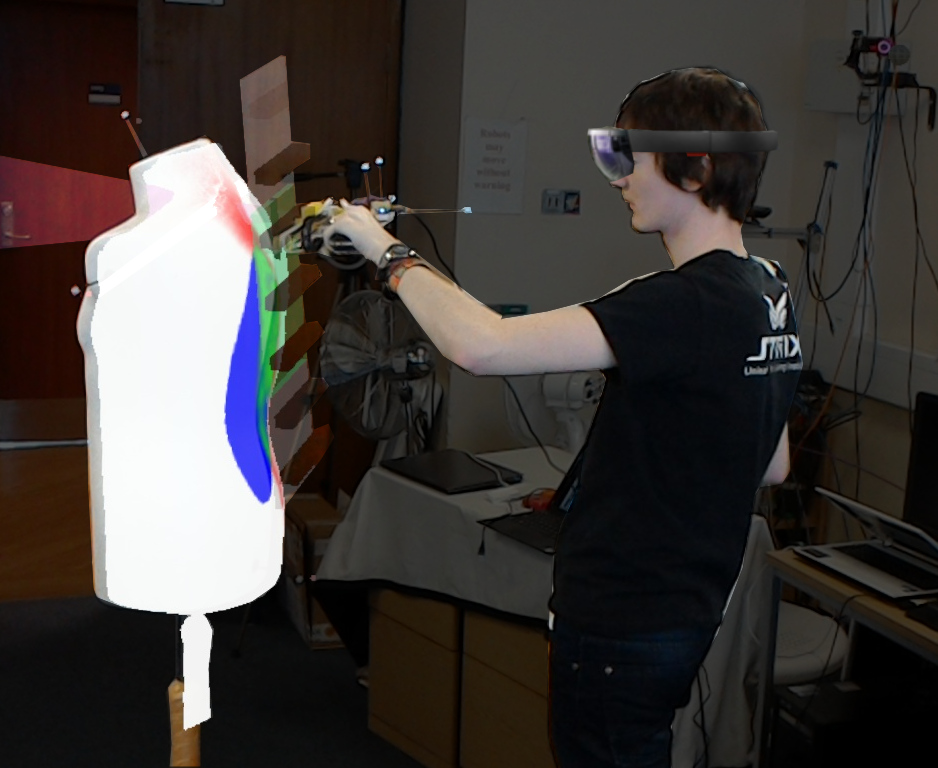
I have had extensive experience with the Microsoft Hololens, which I have used for visual feedback for my handheld robotic experiments. This allows for a very natural communication of the state of the task to the user.
| Categories : | Research |
|---|

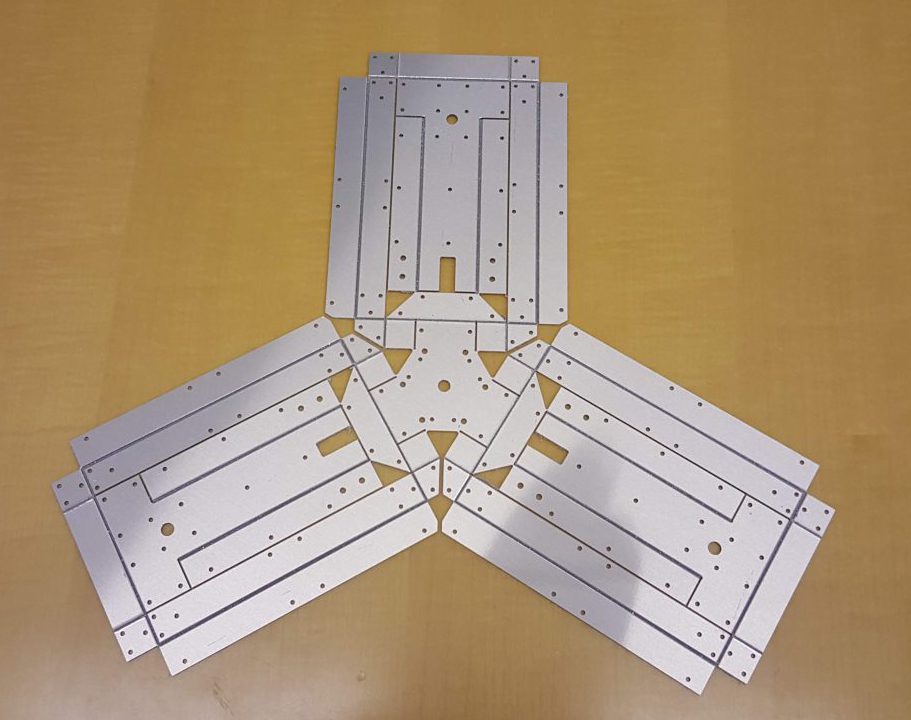
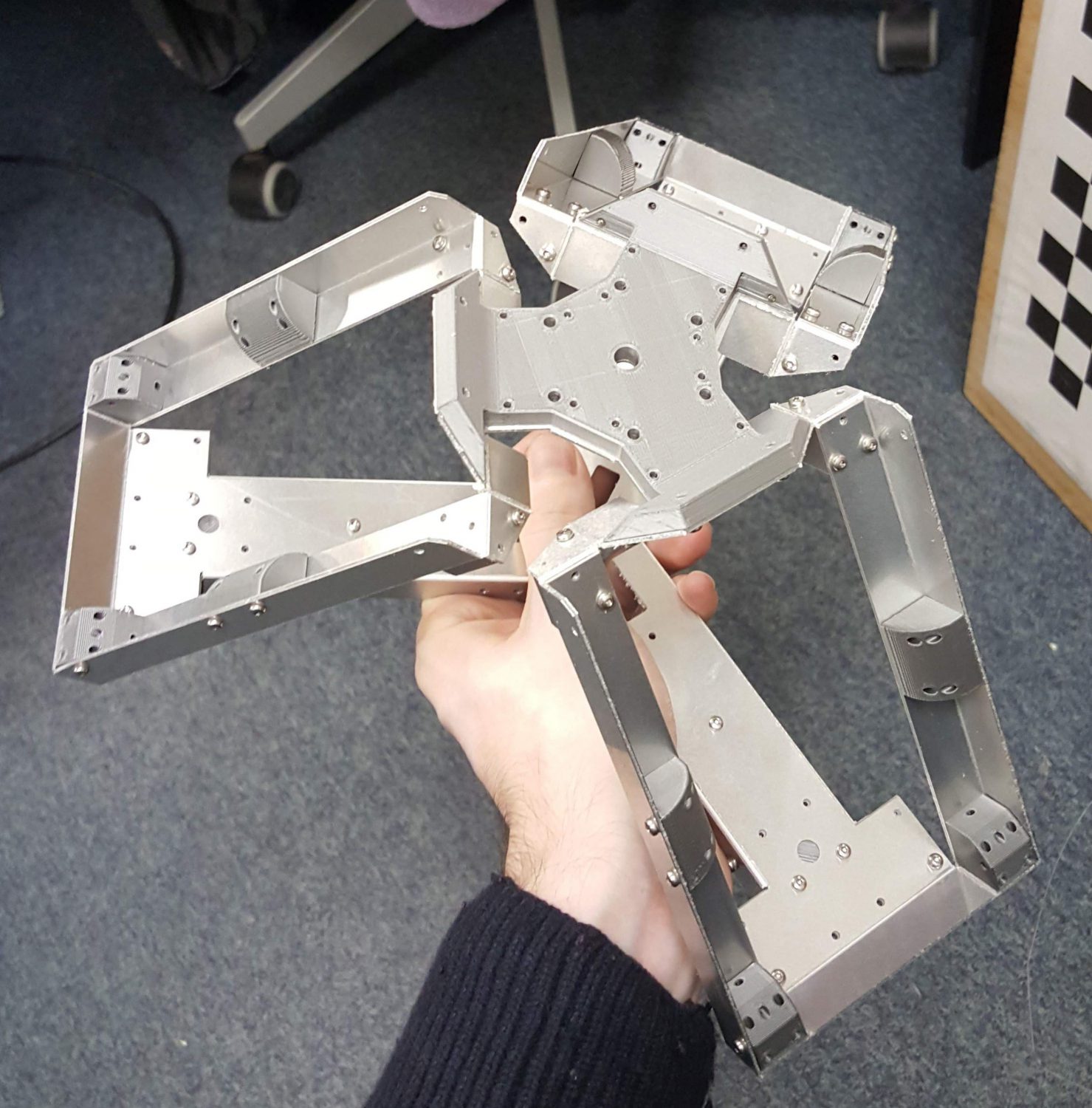
A delta robot is one that uses 3 motors to drive three sets of arms. Each arm is connected to a moving platform through a parallel set beams. The hinges between the arms, beams and moving platform are usually the complicated part of designing such a mechanism. Hence usually one must either contend with significant backlash, or buy expensive joints. In a traditional delta linkage there are 12 ball joints, or in the revolute only version, 24 revolute hinges. My design uses a special method to avoid buying joints entirely. Drastically reducing the cost of a good quality linkage and the skill required to assemble is also reduced.
| Categories : | Research |
|---|---|
| URL : | View Project |
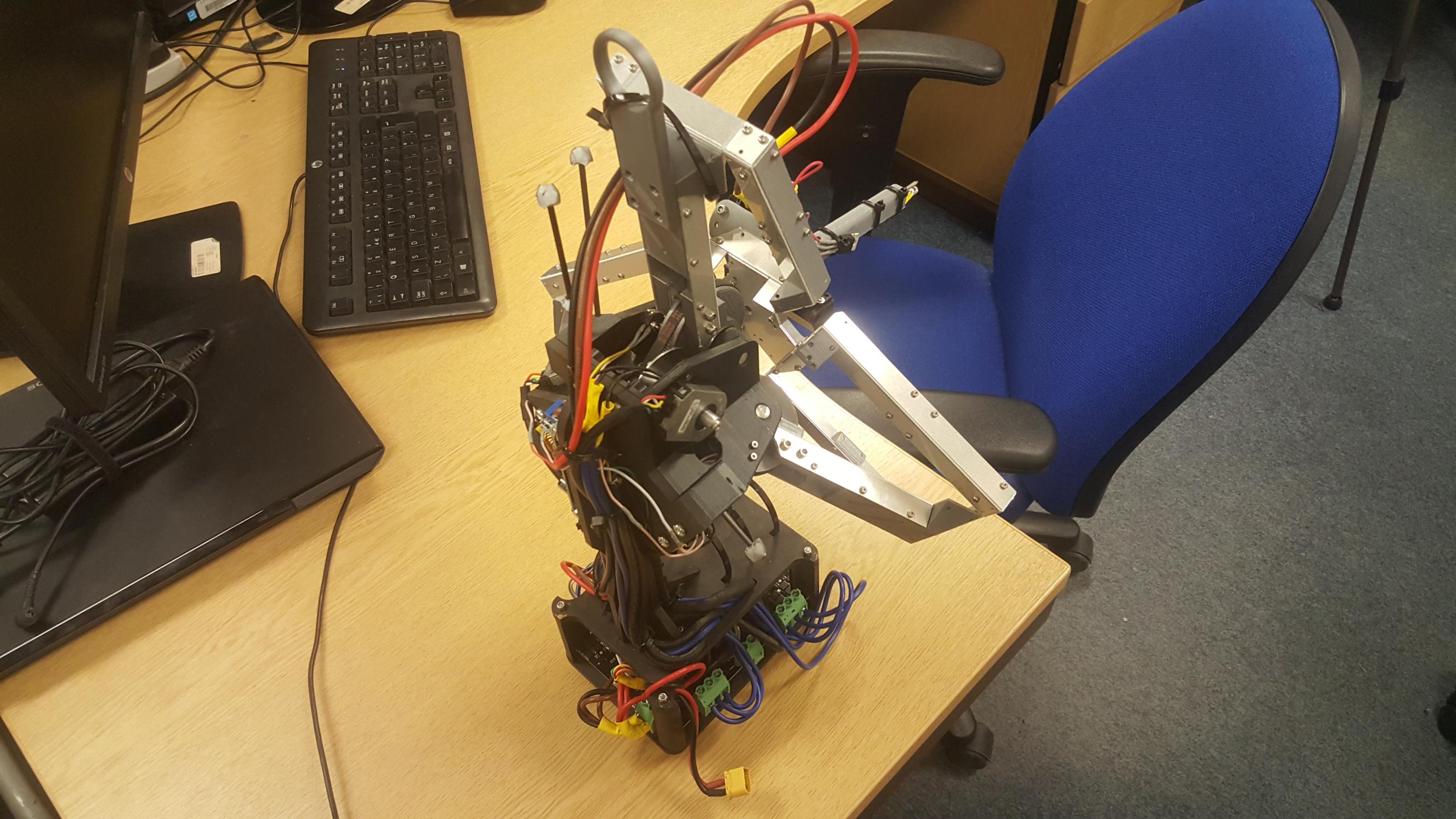
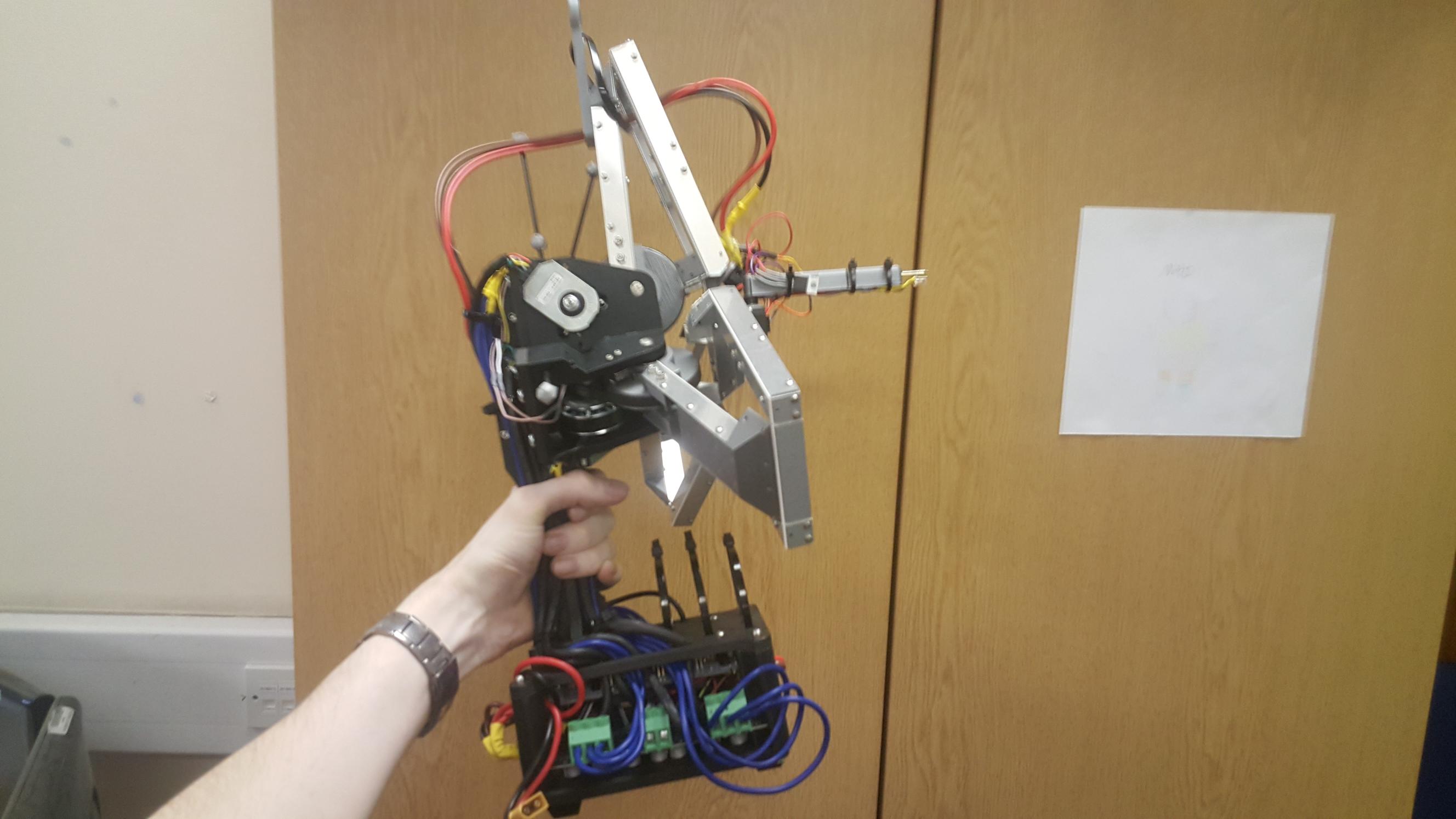
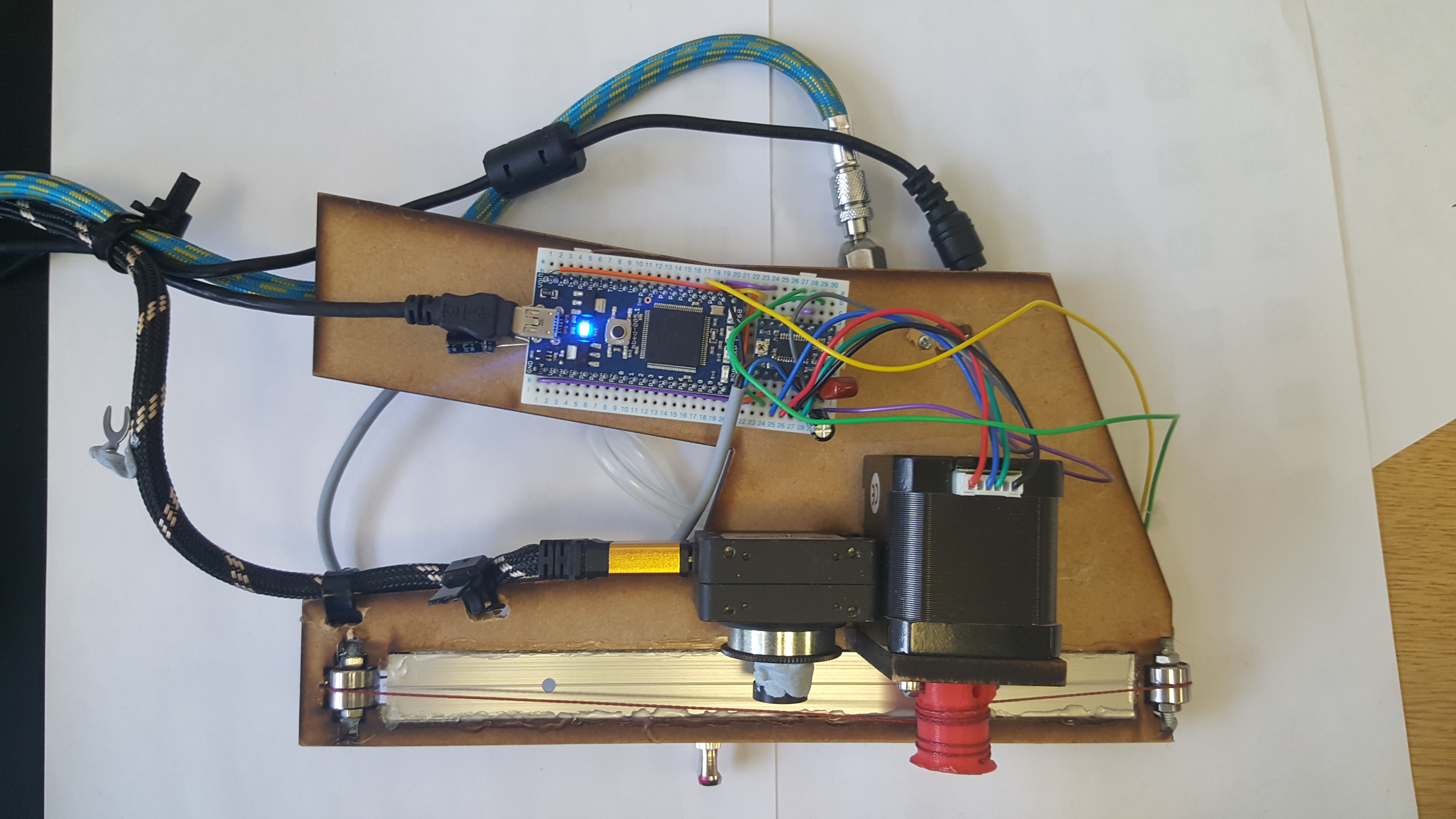

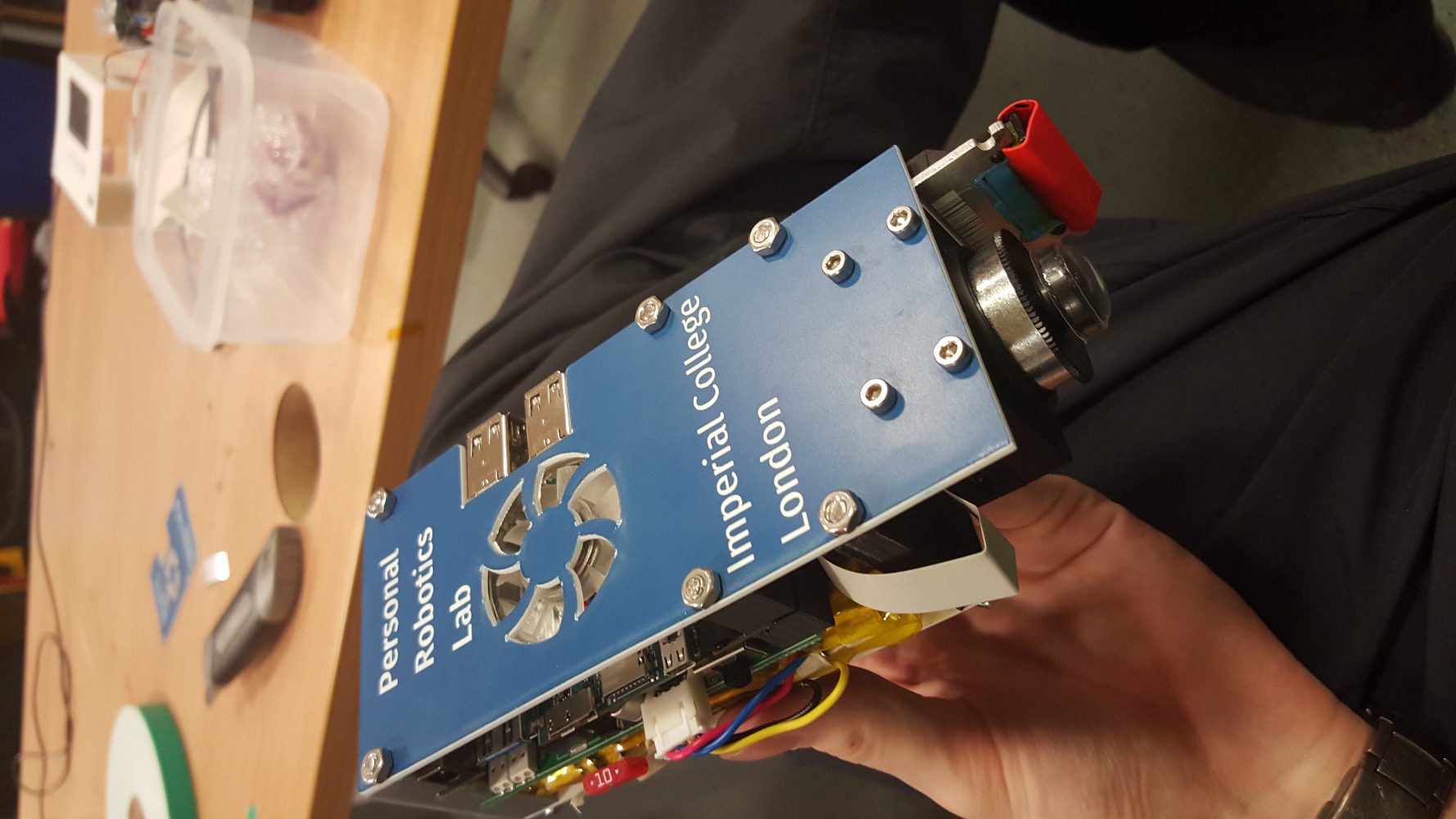
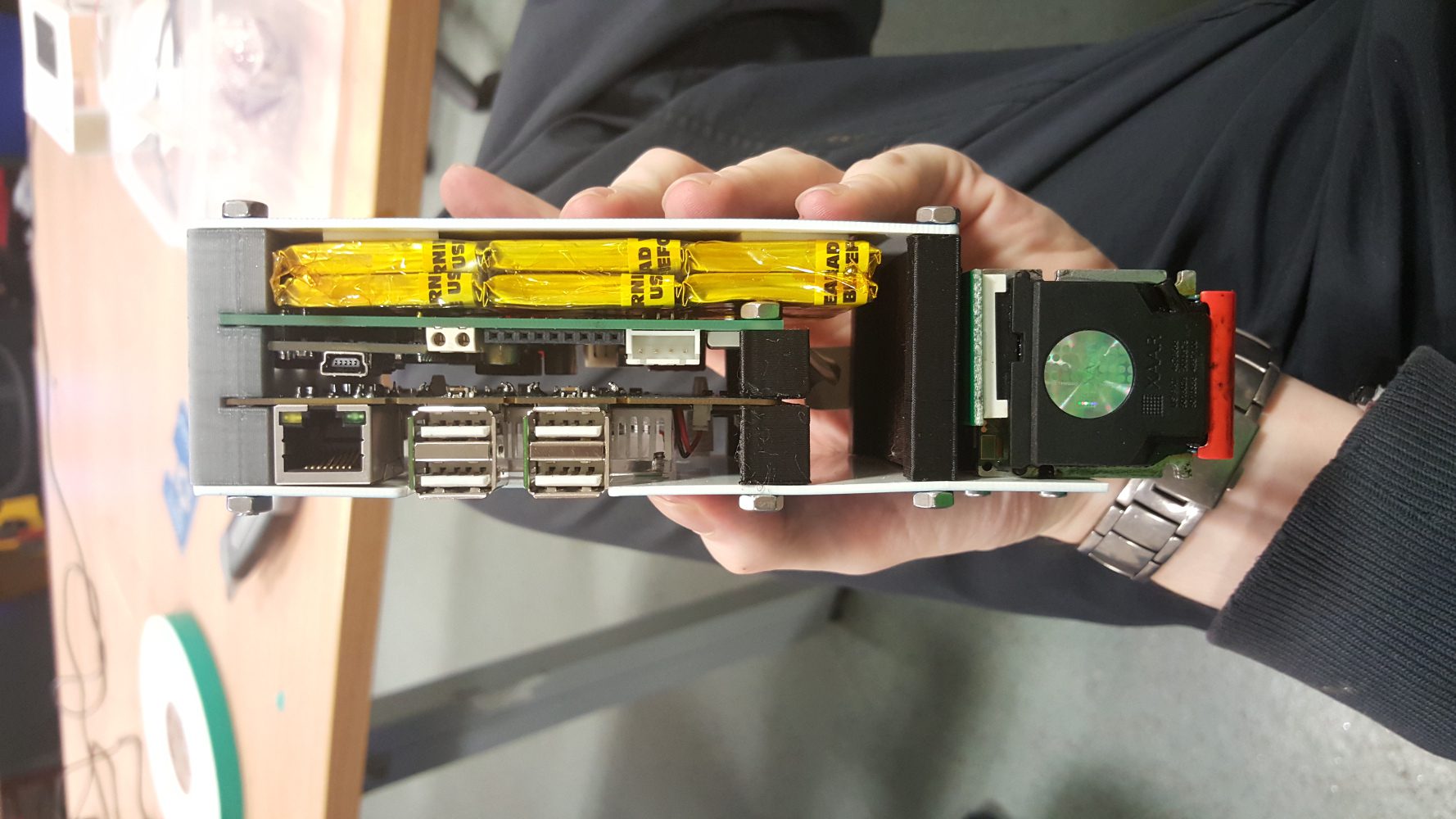
The primary platforms I have been using for my research have been hand-held robots. A hand-held robot is one that has no method of locomotion, and is moved manually by the user and has no reliable link to the ground. The robot then provides some local movement, task specific knowledge and tracking of progress. To be successful this kind of robot must share control with the user. A further peculiarity of such a robot is that one must account for the lack of rigidity that the user’s arm provides, requiring real time estimation of the robots position.
| Categories : | Research |
|---|
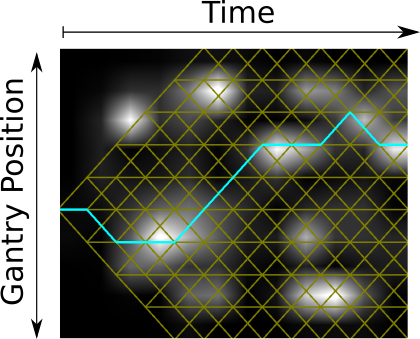
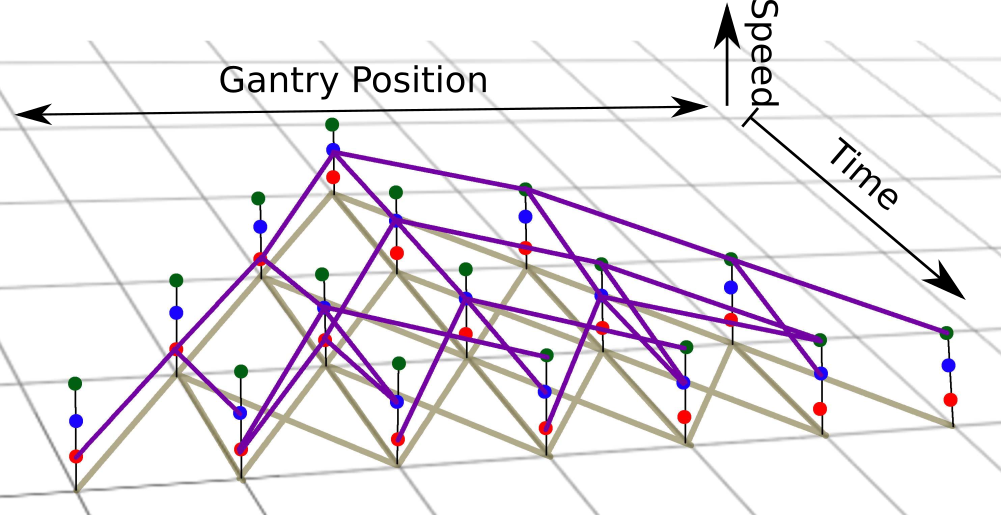
Due to the fact that the user is controlling the locomotion of the robot, and the robot can only provide local movements, path planning of the end effector must be done online. I have developed path planning methods that can control an under-actuated robot (1 DOF) to target pre-defined patches on a target object. Further I have developed a path planner that dynamically chooses pre-defined 3D paths based on the current location of the robot and it’s reachable region in the case where the robot is locally fully actuated (5DOF in the case of spraying tasks).
| Categories : | Research |
|---|

My project has primarily concerned tasks that require a user to spray a liquid onto a 3D surface. As such I have used a number of different spraying technologies: Inkjet, airbrush and pressurised air atomisation. For the purposes of online path planning I have also developed OpenCL accelerated simulators for these methods, allowing for realistic estimation of liquid distribution for arbitrary 3D geometry.
| Categories : | Research |
|---|
Due to the fact that a hand-held robot cannot complete a task without cooperation with the user, the pair naturally forms a shared control system. My work has investigated the level of abstraction that is appropriate to share a spraying task with the user and whether the user should be driving the decision making, or whether the robot should be directing the user. I have also collaborated on some research into shared control of an assisted wheelchair.
| Categories : | Research |
|---|
Formal Publications
- J. Elsdon and Y. Demiris, “Augmented Reality Instructions for Shared Control of Hand-held Robotic Systems,” in 2018 international conference on robotics and automation (icra). workshop: robotics in virtual reality, 2018.
[Bibtex]@inproceedings{Elsdon2018a, author = {Elsdon, Joshua and Demiris, Yiannis}, booktitle = {2018 International Conference on Robotics and Automation (ICRA). Workshop: Robotics in Virtual Reality}, title = {{Augmented Reality Instructions for Shared Control of Hand-held Robotic Systems}}, year = {2018} } - M. Zolotas, J. Elsdon, and Y. Demiris, “Head-Mounted Augmented Reality for Explainable Robotic Wheelchair Assistance,” in 2018 ieee/rsj international conference on intelligent robots and systems (iros), 2018, p. in press.
[Bibtex]@inproceedings{Zolotas, author = {Zolotas, Mark and Elsdon, Joshua and Demiris, Yiannis}, booktitle = {2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, pages = {in press}, publisher = {IEEE}, title = {{Head-Mounted Augmented Reality for Explainable Robotic Wheelchair Assistance}}, year = {2018} } - J. Elsdon and Y. Demiris, “Augmented Reality for Feedback in a Shared Control Spraying Task,” in 2018 international conference on robotics and automation (icra), 2018, p. 1939–1946.
[Bibtex]@inproceedings{Elsdon2018, author = {Elsdon, Joshua and Demiris, Yiannis}, booktitle = {2018 International Conference on Robotics and Automation (ICRA)}, pages = {1939--1946}, publisher = {IEEE}, title = {{Augmented Reality for Feedback in a Shared Control Spraying Task}}, year = {2018} } -
![[DOI]](https://www.elsdon.io/wp-content/plugins/papercite/img/external.png) J. Elsdon and Y. Demiris, “Assisted painting of 3D structures using shared control with a hand-held robot,” in 2017 ieee international conference on robotics and automation (icra), 2017, p. 4891–4897.
J. Elsdon and Y. Demiris, “Assisted painting of 3D structures using shared control with a hand-held robot,” in 2017 ieee international conference on robotics and automation (icra), 2017, p. 4891–4897.
[Bibtex]@inproceedings{Elsdon2017, author = {Elsdon, Joshua and Demiris, Yiannis}, booktitle = {2017 IEEE International Conference on Robotics and Automation (ICRA)}, doi = {10.1109/ICRA.2017.7989566}, isbn = {978-1-5090-4633-1}, month = {may}, pages = {4891--4897}, publisher = {IEEE}, title = {{Assisted painting of 3D structures using shared control with a hand-held robot}}, url = {http://ieeexplore.ieee.org/document/7989566/}, year = {2017} }
Pre-print versions of these works are available here.
Paper Summary Videos
My non-academic projects can be seen on the portfolio page.